Stage Controllers (Motors) Settings Panel
Configuring Motor Controllers
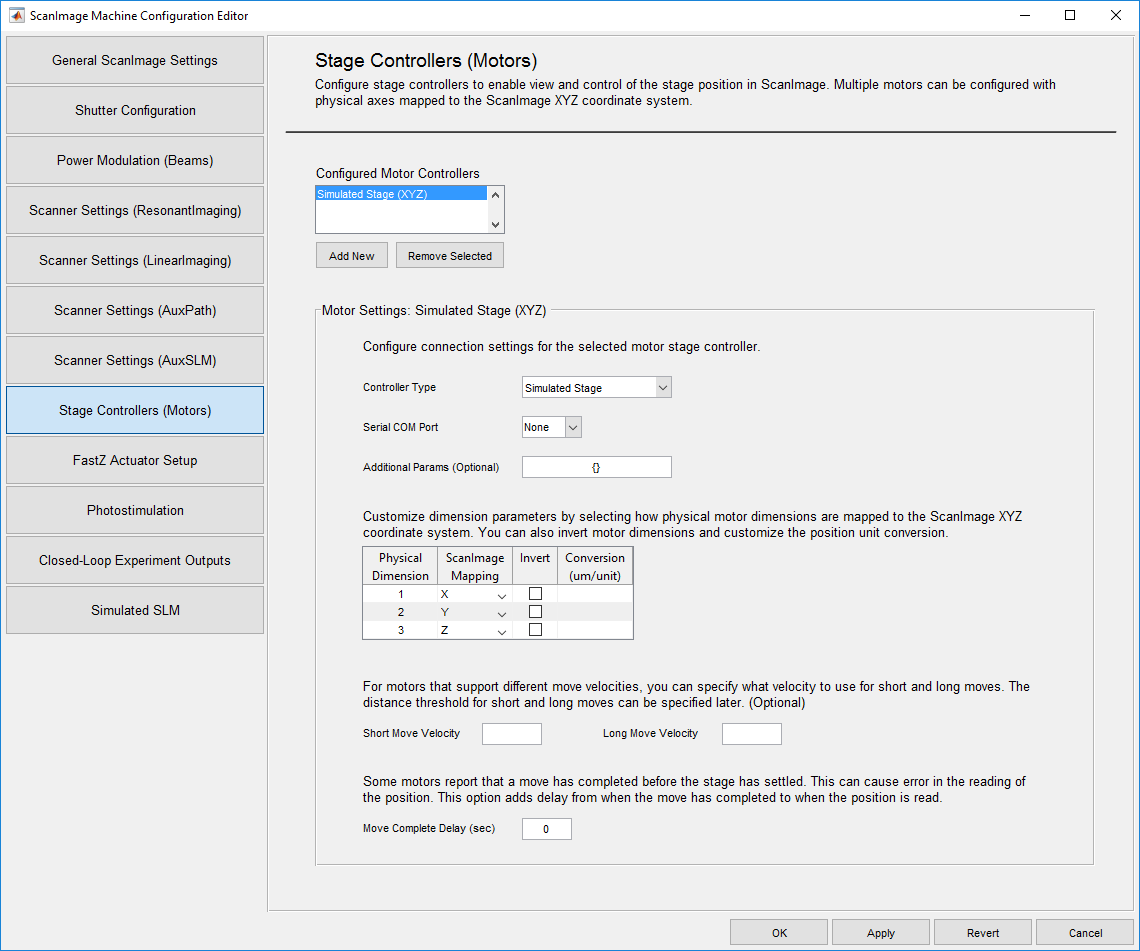
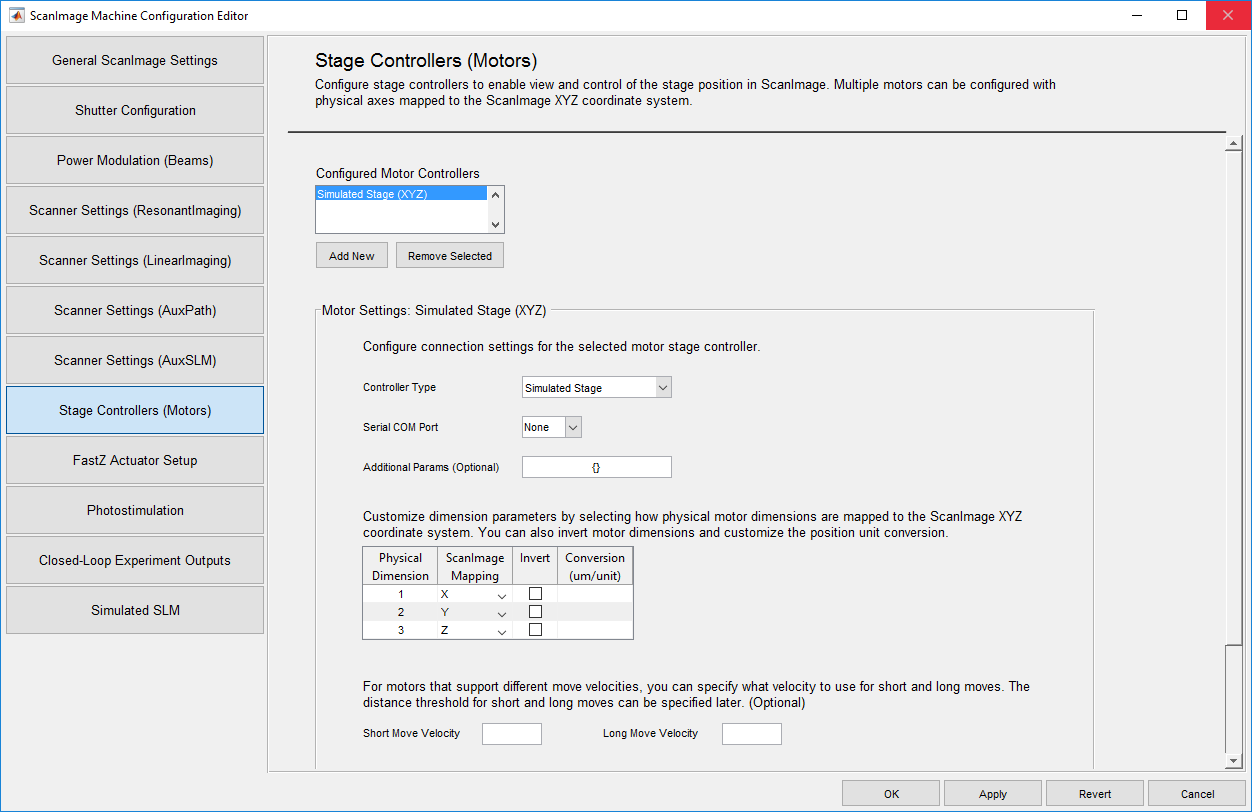
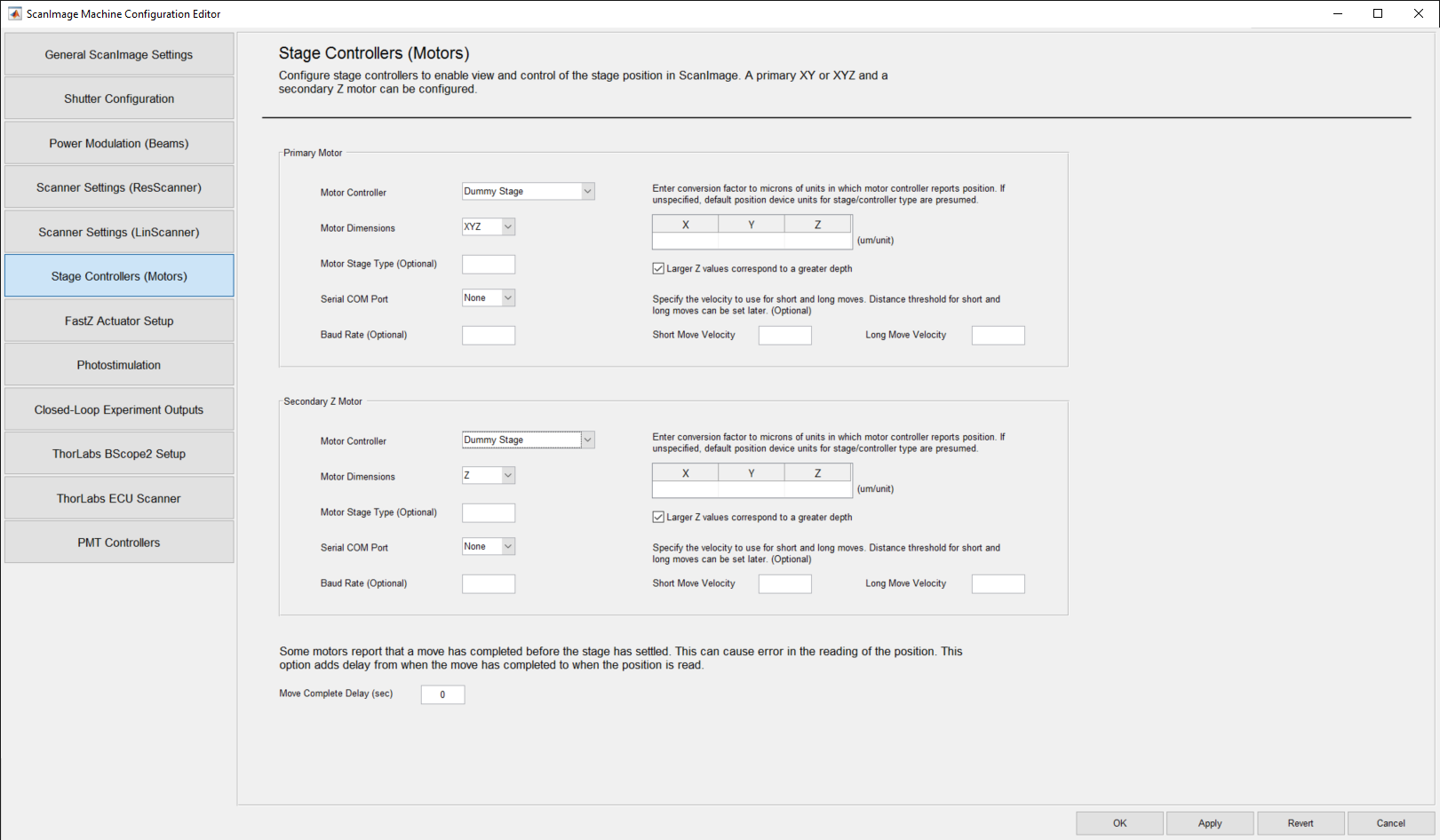
To configure a motor controller, click the Add New button. Multiple motor controllers can be added. For each motor controller the following options can be configured:
| Controller type | Select the Motor Controllet type from the list of supported controllers |
| Serial COM Port | If you are using serial communication, select the COM port to use for the Motor Controller. |
| Additional Params | Some motor controllers have additional optional or required parameters. These should be entered as a cell array of property-value pairs. Ex: {'baudRate' 9600} |
| ScanImage Mapping | Use this column in the table to map motor axes to the ScanImage coordinate system. Each axis (X, Y, and Z) can only be mapped to one axis of one motor controller |
| Invert | Use this column in the table to invert the sign convention of the corresponding axis |
| Conversion Factor | Enter the conversion factor from the position units the motor controller reports to microns for the corresponding axis. If left empty, ScanImage will use the default position device units for the stage/controller type. |
| Short Move Velocity | Enter the velocity to use for moves smaller than the long move distance threshold, in units appropriate to controller type. If left empty, ScanImage will use the default value used for the Motor Controller. |
| Long Move Velocity | Enter the velocity to use for moves larger than the long move distance threshold, in units appropriate to controller type. If left empty, ScanImage will use the default value used for the Motor Controller. |
| Move complete delay (sec) | Enter the Delay, in seconds, from when stage controller reports move is complete until the move should be considered complete. This allows settling time for the motor to improve accuracy of the ending position read out. |
{kind=link}
{kind=link}